تقسیم بندی ماشینهای الکتریکی
ماشینهای الکتریکی به دو طریق دسته بندی می شوند:
1- از نظر نوع جریان الکتریکی:
الف- ماشینهای الکتریکی جریان مستقیم.
ب- ماشینهای الکتریکی جریان متناوب.
2- از نظر نوع تبدیل انرژی:
الف- مولدهای الکتریکی که انرژی مکانیکی را به انرژی الکتریکی تبدیل می کنند
ب- موتورهای الکتریکی که انرژی الکتریکی را به انرژی مکانیکی تبدیل می کنند
به طور کلی ماشینهای الکتریکی جزء وسایل تبدیل انرژی غیر خطی هستند یعنی هر تغییر در ورودی همیشه به یک نسبت در خروجی ظاهر نمی شود.
مولدساده جریان مستقیم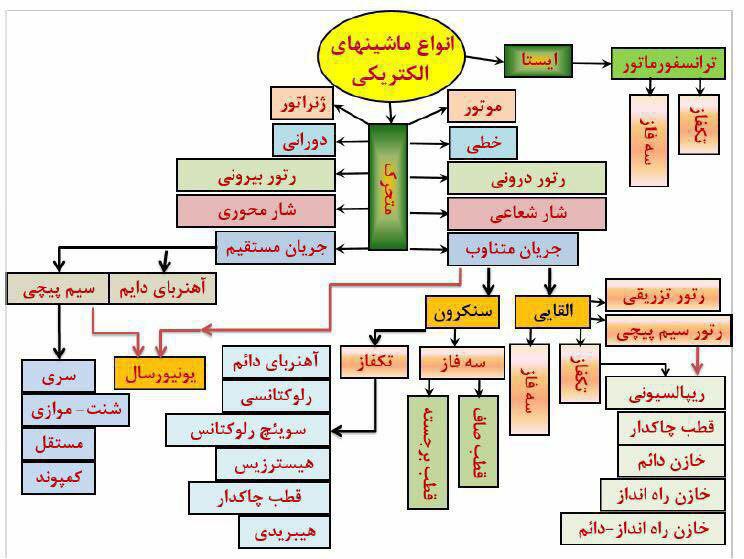
یک مولد ساده جریان مستقیم از چهار قسمت اصلی زیر تشکیل شده است:
1- قطبهای مغناطیسی: که وظیفه ایجاد میدان مغناطیسی مولد را بعهده دارد و می تواند بصورت آهنربای دائم و یا آهنربای الکتریکی باشد.
2- هادیها: برای ایجاد ولتاژ القایی به کار گرفته میشود.
3- کموتاتور: در ساده ترین حالت از دو نیم استوانه مسی که توسط میکا نسبت به یکدیگر عایق شده اند تشکیل می گردد، وظیفه یک طرفه کردن ولتاژ و جریان القایی را در خارج از مولد بعهده دارد.
4- جاروبک: جهت انتقال جریان الکتریکی از هادیها به مصرف کننده استفاده میشود.
طرز کار مولد ساده جریان مستقیم: با حرکت هادیها در فضای ما بین قطبها باعث میشود میدان مغناطیسی توسط هادیها قطع میشود بدین ترتیب مطابق پدیده القاء در هادیها ولتاژ القاء میشود.ابتدا و انتهای هر کلاف به یک نیم استوانه مسی یا یک تیغه کوموتاتور وصل میشود روی تیغه های کوموتاتور دو عدد جاروبک بطور ثابت قرار داشته و با حرکت هادیها تیغه های کموتاتور زیر جاروبک می لغزند، بدین ترتیب در ژنراتورهای جریان مستقیم از طریق کوموتاتور ولتاژ القاء شده طوری به جاروبکها منتقل می شود که همیشه یکی از جاروبکها دارای پلاریته مثبت و دیگری دارای پلاریته منفی است.
برای افزایش سطح ولتاژ القاء شده و بهبود یکسوسازی بمنظور داشتن ولتاژ با دامنه ثابت باید تعداد کلافها را افزایش داد و کلافها را به کمک تیغه های کوموتاتور سری کنیم.
چگونگی تغییر پلاریته ولتاژ القایی در مولد ساده:
در مولد جریان مستقیم تغییر پلاریته ولتاژ خروجی عملا در صورت ایجاد یکی از دو حالت زیر ممکن می شود:
1- جهت چرخش آرمیچر عوض شود.
2- جهت جریان در سیم پیچ قطبها تغییر کند در صورتیکه قطبها از نوع مغناطیس دائم نباشد.
چگونگی تغییر دامنه ولتاژ القایی در مولد ساده:
برای افزایش دامنه ولتاژ القا شده دو روش ممکن است:
1- افزایش سرعت چرخش آرمیچر که باعث افزایش ولتاژ بصورت خطی می شود.
2- افزایش جریان تحریک که باعث افزایش ولتاژ مولد بصورت غیر خطی می شود.
موتور ساده جریان مستقیم
موتور ساده از نظر ساختمانی مانند مولد ساده جریان مستقیم می باشد فقط نحوه کار آن با مولد ساده جریان مستقیم تفاوت دارد. در موتور ساده هادیها از طریق کوموتاتور و جاروبکها به یک منبع جریان مستقیم متصل می شود در اینصورت جریانی از هادیها عبور کرده و در نتیجه مطابق نیروی لورنس به هادیها نیروی وارد میشود و آنها به حرکت در می آید.
نحوه ایجاد نیرو و گشتاور در موتور ساده: در صورتیکه از یک کلاف تک حلقه که بین قطبهای یک مغناطیس قرار دارد جریان الکتریکی عبور کند مطابق شکل به بازوی سمت راست نیروی به سمت بالا و به بازوی سمت چپ نیروی بسمت پایین وارد می شود با وارد شدن دو نیروی مختلف الجهت به دو طرف کلاف طبیعی است که کلاف حول محورش شروع به دوران خواهد نمود یعنی وارد آمدن زوج نیرو موجب ایجاد گشتاور لازم شده است.
در این موتور ساده اگر صفحه کلاف عمود بر خطوط میدان مغناطیسی قرار گیرد به آن گشتاوری وارد نمیشود در ضمن که گشتاور وارد شده نیز دامنه یکنواخت ندارد برای رفع شدن این معایب می بایست تعداد کلافها و تیغه های کوموتاتور را افزایش داد کلافها در زاویه های مختلف قرار می گیرد و با هم توسط تیغه های کوموتاتور سری می شود.
تغییر جهت گردش در موتور ساده DC:
تغییر جهت گردش موتور ساده به دو روش زیر ممکن است:
1- تغییر جهت جریان در کلاف که با تغییر پلاریته ولتاژ منبع از خارج موتور میسر است
2- تغییر قطبهای مغناطیسی که با تغییر جهت جریان در سیم پیچی تحریک ممکن است.
ساختمان ماشینهای جریان مستقیم
اجزاء تشکیل دهنده ماشینهای جریان مستقیم را میتوان به صورت زیر دسته بندی کرد:
1- قسمت ساکن شامل قطبها و بدنه
2- قسمت گردان (آرمیچر)
3- مجموعه جاروبک و جاروبک نگهدارها
هر کدام از قسمتهای فوق بطور خلاصه توضیح داده می شود.
1- اجزاء ساکن ماشینهای جریان مستقیم: قسمتهای ساکن جریان مستقیم شامل اجزاء زیر هستند:
الف- قطبهای اصلی
ب- قطبهای کمکی
ج- بدنه
– قطبهای اصلی: وظیفه این قسمت تامین میدان مغناطیسی مورد نیاز ماشین است. قطبهای اصلی خود شامل قسمتهای زیر می باشد:
– هسته قطب: از ورقهای فولاد الکتریکی به ضخامت حدود 0/5 تا 0/65 میلی متر با خاصیت مغناطیسی قابل قبول تشکیل می شود.
– کفشک قطب: شکل قطب به نحوی است که سطح مقطع کوچکتر برای سیم پیچ اختصاص داده می شود و قسمت بزرگتر که کفشک قطبی نام دارد سبب شکل دادن میدان مغناطیسی و سهولت هدایت فوران مغناطیسی به فاصله هوایی می شود.
– سیم پیچ تحریک: یا سیم پیچ قطب اصلی که دور هسته قطب پیچیده می شود، برای جریانهای کم باید تعداد دور سیم پیچ تحریک زیاد باشد و سطح مقطع آن کم و برا ی جریانهای زیاد تعداد دور کم برای سیم پیچ لازم است و با سطح مقطع زیاد
– قطبهای کمکی: قطبهای کمکی در ماشینهای جریان مستقیم از هسته و سیم پیچ تشکیل می شوند، هسته قطبهای کمکی را معمولاٌ از فولاد یکپارچه می سازند. سیم پیچی قطبهای کمکی نیز با تعداد دور کم و سطح مقطع زیاد پیچیده می شوند.
– بدنه: قطبهای اصلی، کمکی، جاروبک نگهدارها روی بدنه ماشین محکم می شوند و بوسیله ماشین روی پایه اش نصب می گردد. قسمتی از بدنه را هسته آهنی تشکیل می دهد که برای هدایت فوران مغناطیسی قطبهای اصلی و کمکی بکار می رود این قسمت طوق بکار می رود. شکلهای زیر قطب اصلی و کمکی ماشین جریان مستقیم را نشان میدهد.
2- قسمت گردان یا آرمیچر: در ماشینهای جریان مستقیم قسمت گردنده را القاء شوند یا آرمیچر می نامند که از اجزاء زیر تشکیل شده است:
الف- هسته آرمیچر
ب- سیم پیچی آرمیچر
ج- کلکتور یا یکسوکننده مکانیکی
د- محور
ﻫ- پروانه خنک کننده
– سیم پیچی آرمیچر: از کلافهای مشابهی تشکیل می شود که با الگوی مناسب تهیه و در شیارها قرار می گیرد سیم پیچی آرمیچر مبتنی بر اصول فنی بوده و از طراحی ماشینهای جریان مستقیم تبعیت می کند.
– کلکتور: از تیغه های مسی سخت که توسط میکا نسبت به یکدیگر و محور ماشین عایق شده اند تشکیل می شود.
– محور: محور آرمیچر ماشینهای جریان مستقیم باید از فولادی تهیه گردد که خاصیت مغناطیسی آن کم اما استحکام مکانیکی کافی در مقابل تنشهای برشی، کششی، و پیچشی را دارا باشد انتخاب کردن محور ضعیف خطر آفرین بوده و ممکن بوده در مواقع بروز خطا سبب انهدام کلی ماشین گردد.
– پروانه خنک کننده: پروانه خنک کننده سبب تهویه و ازدیاد عمر مفید ماشین میشود شکل زیر آرمیچر ماشین DC با پروانه خنک کننده را نشان میدهد.
3- جاروبک و جاروبک نگهدارها: وظیفه جاروبک نگهدار قرار دادن صحیح جاروبک روی تیغه های کلکتور است جاروبکها قطعاتی از جنس زغال یا گرافیت می باشند که برای گرفتن جریان از کلکتور یا دادن جریان به آن استفاده می شود.
سیم پیچی آرمیچر ماشینهای جریان مستقیم
همانطور که قبلا اشاره شد سیم پیچی آرمیچر مبتنی بر اصول فنی خاص می باشد که در طراحی آن به نکات مهمی از قبیل استحکام مکانیکی، الکتریکی و حرارتی با عمر مفید و عادی حدود 20 سال حداکثر گشتاور و جریان و ولتاژ با حداقل نوسانه جرقه کم بین زغال و کلکتور و صرفه جویی در مواد اولیه باید توجه کرد.
بسته به نیاز کلافها می توانند بطور سری یا موازی یا ترکیبی از این دو به همدیگر وصل می شوند. پویاترانس
در صورتیکه کلافها با هم سری شوند نیرومحرکه کلافها با هم جمع می شوند و ولتاژ دهی آرمیچر افزایش می یابد. (سیم پیچی موجی)
در صورتیکه کلافها موازی شوند تعداد مسیرهای جریان موجود در آرمیچر افزایش یافته و قابلیت ولتاژ دهی آرمیچر افزایش می یابد. (سیم پیچی حلقوی)
الف- سیم پیچی حلقوب شامل حلقوی ساده و حلقوی مرکب
ب- سیم پیچی موجی شامل موجی ساده و موجی مرکب
ج- سیم پیچی پای قورباغه ای
لازم است در اینجا تعداد مسیرهای جریان که در هر نوع ایجاد می شود نیز معرفی شود. تعداد مسیرهای جریان را با 2a نشان میدهند که بشرح زیر است:
حلقوی ساده P2 = a2
حلقوی مرکب P.m2 = a2
موجی ساده 2 = a2
موجی مرکب m2 = a2
P: تعداد قطبهای آرمیچر ، m: درجه مرکب بودن آرمیچر
عکس العمل مغناطیسی آرمیچر: 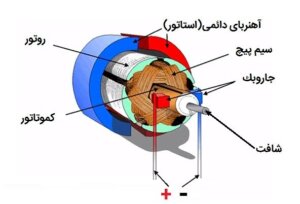
چنانچه ماشینهای جریان مستقیم زیر بار قرار گیرند یعنی از سیم پیچی آرمیچر جریان عبور کند یک میدان عکس العمل (عرضی) توسط آرمیچر ایجاد می گردد. این میدان باعث می شود منطقه خنثی در مولدها در جهت چرخش و در موتورها در خلاف جهت چرخش تغییر مکان دهد. عکس العمل آرمیچر علاوه بر انحراف محور خنثی سبب تضعیف میدان مغناطیسی اصلی می شود در نتیجه نیرو محرکه القاء شده در سیم پیچ کم شده، تلفات انرژی در ماشین و جرقه در زیر جاروبکها بوجود می آید برای از بین بردن و یا کم کردن اثر عکس العمل در ماشینهای جریان مستقیم می توان از قطبهای کمکی و یا در ماشینهای بزرگتر از سیم پیچی جبرانگر هم استفاده کرد.
پدیده کموتاسیون:
تغییر تماس جاروبک از یک تیغه کموتاتور به تیغه دیگر کموتاسیون نام دارد در این جابجایی کلافی که تحت کموتاسیون قرار می گیرد چون توسط جاروبک اتصال شده باید در صفحه خنثی قرار گیرددر عین حال چون جریان در این کلاف در زمان کموتاسیون تغییر مقدار و جهت میدهد سبب بوجود آمدن ولتاژ خود القایی در این کلاف شده و از آنجا که این کلاف توسط جاربک و تیغه های کموتاتور اتصال کوتاه شده است جرقه نسبتاٌ شدید بین زغالها و کموتاتور بوجود می آید. قطبهای کمکی برای رفع این عیب موثر خواهد بود. اما در ماشینهای که قطب کمکی ندارند بهبود عمل کموتاسیون با تغییر محل جاروبکها (در جهت گردش در مولدها و در خلاف جهت گردش در موتورها) انجام گیرد. این جابجایی درست کاملا امکان پذیر و قابل مشاهده می باشد.
رابطه نیرومحرکه القای در ماشینهای DC واقعی
ولتاژ القاء شده در هر ماشین به سه عامل بستگی دارد:
1- فوران مغناطیسی (Ф)
2- سرعت زاویه ای رتور ماشین (ω)
3- ضریب ثابت که به ساختمان ماشین بستگی دارد (K)
این ولتاژ از رابطه رو به رو بدست می آید.
مقدار K و ω را میتوان از رابطه های زیر بدست آورد
P: تعداد جفت قطبهای ماشین
a: تعداد جفت مسیرهای جریان
z: تعداد هادی های آرمیچر
n: سرعت آرمیچر برحسب دور بر دقیقه
رابطه گشتاور تولید شده در آرمیچر ماشینهای جریان مستقیم واقعی
گشتاور تولید شده در ماشینهای جریان مستقیم نیز به سه عامل بستگی دارد:
1- فوران مغناطیسی (Ф)
2- جریان آرمیچر (IA)
3- یک ضریب ثابت (K)
توان و راندمان در ماشینهای Dc
در صورتیکه توان ورودی یک ماشین P1 و توان خروجی آن را P2 بنامیم تفاوت این دو تلفات ماشین نام دارد.
ضریب بهره (راندمان): نسبت توان خروجی به توان ورودی ماشین را ضریب بهره میگویند.
تلفات در ماشینهای DC: تلفات در ماشینهای جریان مستقیم بصورت زیر تقسیم بندی می شوند.
1- تلفات مکانیکی یا اصطکاکی (Pmec).
2- تلفات آهنی یا تلفات هسته (PFe).
3- تلفات مسی (Pcu).
– تلفات مکانیکی بعلت اصطکاک محور ماشین در یاتاقانها و اصطکاک جاروبکها با کلکتور و مقاومت هوا بوجود می آید.
– تلفات هسته از تلفات هیسترزیس و تلفات ناشی از جریانهای گردابی در هسته آرمیچر تشکیل می شود.
– تلفات مسی یا ژولی در اثر عبور جریان از سیم پیچ های تحریک و آرمیچر بوجود می آید.
موتورهای جریان متناوبAC سنکرون
موتورهای جریان متناوبAC:
1- موتورهای سنکرون
2- موتورهای آسنکرون
موتورهای آسنکرون به علت نداشتن کلکتور و سادگی ساختمان آن بیشتر از موتور سنکرون متداول است.
مزایای موتور سنکرون:
1- این موتور دارای ضریب قدرت مناسب و قابل تنظیم است.
2- بازده عالی دارد.
3- در مقابل نوسان ولتاژ حساسیت ندارد.
4- امکان بکار بردن آن به طور مستقیم با ولتاژ زیاد وجود دارد.
5- با تحریک مناسب هیچگونه قدرت راکتیو مصرف نمیکند و فقط قدرت اکتیو مناسب می گیرد.
6- از این موتور میتوان به عنوان مولد قدرت راکتیو برای بالا بردن ضریب قدرت خط استفاده کرد.
معایب موتور سنکرون:
1- یک وسیله راه اندازی اولیه که موتور کمکی و غیره می باشد احتیاج دارد.
2- علاوه بر جریان متناوب برای سیم پیچ استاتور ، جریان دائم برای قطبهای آن هم مورد احتیاج است در نتیجه قیمت ماشین را نسبت به مشابه خود بالا میبرد.
3- سرعت آن ثابت است در نتیجه قابل تنظیم است.
4- نداشتن تحمل اضافه بار ( در صورتیکه خیلی زیادتر از حد مجاز به آن بار دهند میایستد و دوباره بایستی آنرا راه اندازی کرد ).
کاربرد موتور سنکرون:
به خاطر راه اندازی مشکل موتور سنکرون ، مورد استفاده آن محدود است.
به خاطر سرعت ثابت آن، در مواردیکه دور ثابت نیاز باشد، استفاده می شود. در وسایل دقیق مانند ساعتهای الکتریکی و گرام و….
کاربرد مهم موتور سنکرون ، برای اصلاح Cosφ است. بار روی آن قرار نداده یعنی موتور بدون بار کار میکند در این حالت موتور سنکرون را خازن سنکرون گویند
معرفی چند دستگاه برای کنترل سرعت موتورهای AC
این دستگاهها برای کنترل سرعت موتورهای AC آسنکرون قفس سنجابی و یا سیم پیچی شده ساخته شده اند.
این دستگاهها قابل کنترل از راه دور بوده و می توانند به کامپیوتر یا PLC متصل شوند. همچنین با اتصال چندین دستگاه به هم امکان ایجاد شبکه بر اساس پروتکل RS485 وجود دارد. این دستگاهها می توانند بصورت مستقل و یا در سیستمهای کنترل و اتوماسیون صنعتی مورد استفاده قرار گیرند. سیستم کنترل این دستگاهها میکروپروسسوری بوده و تنظیم تمامی پارامترهای سیستمی دستگاه، بصورت نرم افزاری و از طریق پانل کنترل روی دستگاه انجام می گیرد.
مشخصات فنی و معرفی قابلیتهای دستگاههای PSMC-RM
این دستگاهها در توانهای مختلف از 2.2 تا 11 کیلو وات موجود می باشند. دستگاههای2.2 ،3 و 4 کیلووات فاقد فن خنک کننده و دستگاههای 5.5 ، 7.5 و 11 کیلووات دارای فن خنک کننده می باشند.
درایوها چه کاری انجام میدهند؟
درایو یا کنورتور فرکانس و یا کنترل کننده دور موتور برای تنظیم دور الکتروموتورهای AC(موتورهای سه فاز ) استفاده میگردد. درایوها قادرند دور موتور را از صفر تا چندین برابر دور نامی موتور و بطور پیوسته تغییر دهند.
تنظیم دور در الکتروموتورها علاوه بر منعطف نمودن پروسه های صنعتی ، در کاربردهای زیادی منجر به صرفه جوئی انرژی هم میگردد. علاوه بر آن درایوها جریان راه اندازی کشیده شده از شبکه را به میزان زیادی کاهش میدهند. بطوریکه این جریان خیلی کمتر از جریان اسمی موتور است.
درایوها میتوانند موتور را بطور نرم و کاملا کنترل شده استارت و استپ نمایند. زمان استارت و استپ را میتوان بدقت تنظیم نمود. این زمانها میتوانند کسری از ثانیه و یا صدها دقیقه باشد. توانائی درایو در استارت و استپ نرم موجب کاهش قابل ملاحظه تنشهای مکانیکی در کوپلینگها و سایر ادوات دوار میگردد.
کنترل کننده های دور موتور:
کنترل کننده های دور موتورهای الکتریکی هر چند که ادوات پیچیده ای هستند ولی چون در ساختمان آنها از مدارات الکترونیک قدرت استاتیک استفاده می شود و فاقد قطعات متحرک می باشند، از عمر مفید بالائی برخوردار هستند. مزیت دیگر کنترل کننده های دور موتور توانائی آنها در عودت دادن انرژی مصرفی در ترمزهای مکانیکی و یا مقاومت های الکتریکی به شبکه می باشد. در چنین شرائطی با استفاده از کنترل کننده های دور مدرن می توان از اتلاف این نوع انرژی جلوگیری نمود. بطوریکه در برخی کاربردها قیمت انرژی بازیافت شده از این طریق ، در کمتر از یکسال معادل هزینه سرمایه گذاری سیستم بازیافت انرژی می شود.
کنترل کننده های دور موتور انواع مختلفی دارند. آنها قادرند انواع موتورهای AC و DC را کنترل کنند. قیمت کنترلرها وابسته به نوع تکنولوژی بکار رفته در ساختمان آنها میباشد. پویاترانس
1- روش تثبیت نسبت ولتاژ به فرکانس(یا کنترل V/ F ثابت): ساده ترین روش کنترل موتورهای AC روش تثبیت نسبت ولتاژ به فرکانس میباشد. اینک این روش، بطور گسترده در کاربردهای صنعتی مورد استفاده قرار میگیرد. این نوع کنترلرها از نوع اسکالر بوده و بصورت حلقه باز با پایداری خوب عمل میکنند. مزیت این روش سادگی سیستمهای کنترلی آن است. در مقابل این نوع کنترلرها برای کاربردهای با پاسخ سریع مناسب نمی باشند.
2- روش کنترل برداری: روبوتها و ماشینهای ابزار نمونه هائی از کاربردهای با دینامیک بالا هستند. در این کاربردها روشهای کنترلی برداری استفاده میشود. در روشهای کنترلی برداری با تفکیک مولفه های جریان استاتور به دو مولفه تورک ساز و فلو ساز، و کنترل آنها با استفاده از رگولاتورهای PI ترتیبی داده میشود که موتور AC نظیر موتور DC کنترل شود. و بدین ترتیب تمام مزایای موتور DC از جمله پاسخ گشتاور سریع آنها در موتورهای AC نیز در دسترس خواهد بود.
3- روش کنترل مستقیم گشتاور (Direct Torque Control ): پاسخ گشتاور در روشهای برداری حدود 20-10 ms و در روشهای کنترل مستقیم گشتاور(Direct Torque Control ) این زمان حدود 5 ms است.
تنظیم دور موتورهای آسنکرون:
در قسمت های قبل انواع راه اندازی این موتورها گفته شد در این قسمت انواع روشهای کنترل دور را می نویسم.
با دانستن رابطه(Nr=[60f/p](1-S دور موتور آسنکرون را میتوان به طریقه های زیر تنظیم نمود:
1- تغییر فرکانس ولتاژ شبکه
2- تغییر قطبها
3- داخل کردن مقاومت در مدار روتور
4-  تغییر ولتاژ موتور
تغییر ولتاژ موتور
1- تغییر دور بوسیله تغییر فرکانس: با تغییر فرکانس سرعت سنکرون تغییر میکند و دور موتور تغییر میکند. میتوان برای تغییر فرکانس از یک مولد یا مبدل فرکانس استفاده نمود. و یک یا چند موتور القایی که در شرایط مشابهی کار می کنند بوسیله آنها تغذیه شوند. مانند موتور ماشینهای کارخانه فولاد سازی و موتورهای محرک ماشین نساجی.
2- تغییر دور بوسیله تغییر عده جفت قطبها: این تغییر را در موتورهای آسنکرونی است که بتوان با سیم پیچهای آن تغییر قطب داد که این حالت در موتورهای دو سرعته ( دالاندر ) دیده می شود که میتوان با کلید ( دالاندر ) دور موتور را تغییر داد.
3- تغییر دور با داخل کردن مقاومت در مدار روتور: در موتورهای آسنکرون با روتور سیم پیچر شده با تغییر مقاوت مدار روتور میتوان سرعت گردش روتور را تنظیم کرد ولی چون راندمان موتور بر اثر تغییر دور تغییر میکند در نتیجه کاربرد این روش خیلی کم است.
4- تغییر دور با تغییر ولتاژ: از این روش در موتورهای کوچک مانند پنکه و… استفاده میشود
روشهای مختلف راه اندازی موتورهای آسنکرون
موتورهای آسنکرون با توجه به قدرت و ولتاژ آن به طرق مختلف راه اندازی میشوند و با توجه به اینکه موتور در لحظه شروع به کار جریان زیادی میکشد و این جریان زیاد علاوه بر اینکه به خود موتور صدمه میزند به مصرف کننده های دیگری که از این خط تغذیه می کنند لطمه زده و کار آنها را مختل می سازد.
بنابراین برای کم کردن جریان شروع به کار موتور باید چاره ای اندیشید؟
معمولاً به روشهای زیر راه اندازی میشود در نتیجه جریان راه اندازی کم میشود:
1- به طور مستقیم
2- توسط کلید یا مدار ستاره – مثلث
3- توسط کمپانساتور
4- راه اندازی بوسیله اضافه کردن مقاومت در مدار روتور
5- راه اندازی بوسیله داخل کردن مقاومت در مدار استاتور
1- راه اندازی موتور به طور مستقیم: برای موتورهایی که بزرگ نیستند و آمپر زیادی از شبکه نمی کشند بوسیله یک کلید سه قطبی به شبکه متصل میشوند.
2- راه اندازی ستاره – مثلث: ابتدا ولتاژ اولیه را که بر هر فاز متصل میشود ، را کم مى کنیم سپس وقتی که موتور به دور نرمال خود رسید ولتاژی که به هر فاز می رسد را زیاد می کنیم.
بنابراین در لحظه اول کلید به حالت ستاره بوده یعنی ولتاژ دو سر هر فاز به u/√3 تقلیل می یابد در نتیجه موتور با توان 1/3 توان نامی خود کار می کند.
استعمال کلید روی انواع موتورها با روتور قفسه ای یا روتور سیم پیچی امکان پذیر است. ولی در موتورهایی که با بار زیاد کار می کنند از کلید برای راه اندازی استفاده
نمی شود. چون گشتاور مقاوم بار زیاد است.
3- راه اندازی توسط کمپانساتور: این وسیله راه اندازی که اتوترانسفورماتور کاهنده است بین موتور و شبکه قرار می گیرد. این طریق راه اندازی به دلیل اینکه جریان شروع به کار و گشتاور شروع به کار هر دو به یک نسبت پایین می آیند خیلی خوب است. ولی چون هزینه آن گران است فقط در موتورهایی که قدرت زیاد دارند استفاده می شوند.
4- راه اندازی موتورهای قفسه ای بوسیله قرار دادن مقاومت سر راه استاتور: برای جلوگیری از عبور جریان زیاد در موقع راه اندازی موتور میتوان مقاومت هایی به طور سری سر راه سیم پیچی های موتور قرار دارد. و به تدریج که موتور دور می گیرد دسته مقاومتهای راه انداز را به طرف چپ حرکت داده در این صورت کم کم مقاومتها از سر راه مدار خارج میشود.این طریق راه اندازی به دلیل تلفات انرژی در مقاومتها زیاد و نیروی کشش در لحظه شروع به کار کم ، استعمال کمی دارد.
5- راه اندازی موتورهای آسنکرون با روتور سیم پیچی با قرار دادن مقاومت سر راه روتور: تمام مقاومتهای راه انداز را سر راه سیم پیچی روتور قرار داد. بدین وسیله مقاومت مدار سیم پیچی روتور را به حداکثر مقدار خود میرسانند و سپس استاتور را به شبکه برق وصل می کنند. مقاومت روئستای روتور به تدریج از مدار خارج میشود.
پیدا کردن سرسیم های موتور آسنکرون UVW-XYZ
آیا می دانید اگر موتور آسنکرونی سه فازی داشته باشیم و 6 سر سیم ، که سر سیم های آن مشخص نیست ، چه باید کرد ؟؟
تعیین آرایش کلافها در شیار:
موتورهای سه فاز از سه سیم پیچ تشکیل شده که هر کدام از این سیم پیچها 1/3 شیارهای استاتور را اشغال می کند. این سیم پیچها به فاز اول (R) ، فاز دوم (S) ، فاز سوم (T) شناسایی می شوند. سیم پیچی که از فاز R تغذیه می کند شروع سیم پیچی را (U ) و انتهای آنرا با ( X )
سیم پیچی که از فاز S تغذیه می کند شروع سیم پیچی را (V ) و انتهای آنرا با ( Y )
سیم پیچی که از فاز T تغذیه می کند شروع سیم پیچی را (W ) و انتهای آنرا با ( Z )
برای یافتن سر سیم ها:
ابتدا باید دو سر هر کلاف را پیدا کنید از مولتی متر یا هر روش دیگری که می شناسید.( یک سر مولتی متر را به یک سر سیم گرفته ، سر دیگر مولتی متر را با 5 سر سیم باقی مانده امتحان می کنید. هر کدام که راه داد ، آن یک کلاف سیم پیچ است ).
اگر سیم پیچ U-X را از ولتاژ متناوب تغذیه کنیم. در سیم پیچ ( 4-3 ) و ( 6-2 ) نصف ولتاژ تغذیه القا می شود.
اگر اختلاف سطح ولتاژ بین ( 2-1 ) و ( 3-1 ) حدود 1/5 برابر ولتاژ تغذیه U-X باشد. اتصال صحیح است در این صورت ما بین ترمینالهای ( 2و3 ) اختلاف پتانسیل صفر خواهد بود.
اگر اختلاف سطح بین 1و3 کمتر از اختلاف سطح تغذیه باشد در این صورت جای 4و3 را با یکدیگر عوض می کنیم.
اگر اتصال سیم پیچها به صورت مثلث باشد. ابتدا ستاره اتصال داده و با معلوم شدن سرها ، سیم پیچ را مجدداً به صورت مثلث اتصال می دهیم.
اشتباه در سرسیم ها:
همانطور که می دانیم موتور سه فاز از سه سیم پیچ تشکیل شده است.که هر کدام از سیم پیچها 1/3 شیارهای استاتور را اشغال کرده و باعث تشکیل قطب در موتور
می شود و قطب ها حرکت دورانی به روتورمی دهد. حال اگر سر سیمی تغییر کند در موتور ایجاد قطب نمی شود و موتور حرکت نمی کند و می تواند باعث سوختن موتور شود.
قبل از انجام کار اگر بار روی موتور قرار دارد بار را از روی موتور بردارید. ( تسمه یا…)
روتور سیم پیچی شده:
به جای میله ، استاتور را می توان سیم پیچی سه فاز کرد و این سیم پیچها را به صورت ستاره وصل می کنیم. در روی محور این موتور سه حلقه که نسبت به هم و نسبت به محور عایق هستند (رینگ) قرار دارد. سه سر سیم پیچی روتور به این سه حلقه متصل می شود و به وسیله جاروبکهائی که روی حلقه ها تکیه دارند به یک مقاومت سه فاز ستاره متصل میشود.
مزایای موتور آسنکرون با روتور سیم پیچی شده:
1- در موقع شروع به کار گشتاور قوی دارد.
2- بر خلاف موتور آسنکرون با روتور قفسه ای که جریان شروع به کار آنها کم است جریان شروع به کار کمی دارد.
3- سرعت آن در مقابل بارهای مختلف تقریباً ثابت است.
4- تعداد دور آن تا حدی قابل تنظیم است.( با کم و زیاد کردن رئوستا راه انداز)
5- میتوان تا حدی بار آن را زیاد کرد.
معایب موتورهای آسنکرون با روتور سیم پیچی شده:
1- در مقابل تغییر ولتاژ حساسیت دارد.
2- ضریب قدرت آن در موقعیکه بار به حد نرمال نیست کم می باشد.
3- ضریب قدرت آنها نسبت به ضریب قدرت موتور آسنکرون با روتور قفسه ای کمتر است.
موارد استفاده و کاربرد موتورهای آسنکرون با روتور سیم پیچی شده:
از موتور آسنکرون با روتور سیم پیچی شده: برای قدرت های خیلی زیاد مخصوصاً اگر با فشار قوی باشد استفاده می شود و یا اینکه در موقع شروع به کار ، موتور احتیاج به گشتاور زیاد داشته باشد مانند به راه انداختن ترن یا جرثقیلها و غیره
موتور آسنکرون با روتور قفسه ای (Squirrel Cage Rotor)
روتور قفسه سنجابی (Squirrel Cage Rotor)
از یک عده میله مسی یا آلومینیومی که در شیارهای محیطی استوانه آهنی کار گذاشته است.که بر دو نوع است که نوع اول از میله های گرد تشکیل شده است و در نوع دوم از میله های مستطیلی و یا به شکل دو دایره که به هم متصل و یا جدا از هم هستند تشکیل میشود.
روتور های قفسه ای یک طبقه ، گشتاور خوبی در شروع به کار ندارند.
روتور های قفسه ای دو طبقه ، گشتاور خوبی در شروع به کار دارند.
مزایای موتور آسنکرون با روتور قفسه ای:
1- راه اندازی موتور آسنکرون با روتور قفسه ای بر خلاف موتور سنکرون خیلی ساده میباشد یعنی نه به موتور فرعی و نه به جریان دائم که در موتورهای سنکرون مورد احتیاج بود،
احتیاج دارد.
2- ساختمان این موتور ساده است.
3- امکان افزایش بار در آنها زیاد است.
4- سرعت آن در بارهای مختلف تقریباً ثابت است.
5- ضریب قدرت بهتری نسبت به موتور آسنکرون با روتور سیم پیچی شده دارد.
معایب موتور آسنکرون با روتور قفسه ای:
1- در موقع شروع به کار جریان زیادی از شبکه میگیرد.
2- گشتاور شروع به کار آن کم میباشد.
3- در موقعیکه بار آن به حد کافی نیست ضریب قدرتش کم است
4- در مقابل تغییر فشار الکتریکی حساسیت دارد.
5- تنظیم تعداد دور آنها مشکل می باشد.
موارد استفاده و کاربرد موتورهای آسنکرون:
1- موتور آسنکرون با روتور سنجابی که روتور آن دارای یک قفسه هادی است: برای قدرتهای کم و غالباً به صورت تک فاز ساخته می شوند. موارد کاربرد آن موتورهای کولر و لباسشوئی و و یخچال و غیره می باشد.
2- موتور آسنکرون با روتور سنجابی که روتور آن دارای دو قفسه هادی است: دارای گشتاور شروع به کار خوب و جریان راه اندازی آنها نیز نسبتاً کم است بنابراین میتوان از این موتور در جاهایی که قدرت زیاد احتیاج است استفاده شود.
موتورهای آسنکرون
ساختمان موتور آسنکرون:
1- استاتور
2- روتور
- استاتور: یک استوانه تو خالی ، که این استوانه از صفحات نازک فولاد سیلیسیم دار به ضخامت0/5میلیمتر ساخته شده است.و این استوانه داخل یک پوسته چدنی پیچ شده است
- روتور: از یک استوانه آهنی که از ورقه های مخصوص فولاد که نسبت به هم عایق هستند ساخته شده و روی محوری سوار میشود.در محیط این استوانه شیارهائی یا سوراخهائی تعبیه شده که این شیارها نیمه بسته یا تمام بسته هستند. که انواع مختلفی دارد:
الف- روتور قفسه سنجابی: از یک عده میله مسی یا آلومینیومی که در شیارهای محیطی استوانه آهنی کار گذاشته است.که بر دو نوع است که نوع اول از میله های گرد تشکیل شده است و در نوع دوم از میله های مستطیلی و یا به شکل دو دایره که به هم متصل و یا جدا از هم هستند تشکیل میشود.
روتور های قفسه ای یک طبقه ، گشتاور خوبی در شروع به کار ندارند.
روتور های قفسه ای دو طبقه ، گشتاور خوبی در شروع به کار دارند.
آیا می دانید چرا شیارها در روی روتور مورب می باشد ؟ با مورب کردن شیارها ، لرزش و صداهای موتور جلوگیری می کند. همچنین از تمایل روتور به ایستادن و قفل شدن در موقع راه اندازی جلوگیری می کند.
ب- روتور سیم پیچی شده: به جای میله ، استاتور را می توان سیم پیچی سه فاز کرد و این سیم پیچها را به صورت ستاره وصل می کنیم. در روی محور این موتور سه حلقه که نسبت به هم و نسبت به محور عایق هستند (رینگ) قرار دارد. سه سر سیم پیچی روتور به این سه حلقه متصل می شود و به وسیله جاروبکهائی که روی حلقه ها تکیه دارند به یک مقاومت سه فاز ستاره متصل میشود
تشکر